「豊川用水通水51周年記念 川×テクノロジの祭典」のキャッチフレーズでお馴染みのカワテク東三河が2019年3月3,4日の日程で開催されましたのでレポートします。
概要
その舞台となる 豊川用水に関する歴史や文化を独立行政法人水資源機構のご担当者様にご講演を頂き、東海地方の著名なウィキペディアンとともに地域の情報を編集し、オープンデータ増進を目指します。そして、今回エントリー頂いた耐水ロボット開発者らによる愛機ご紹介と放流の意気込みを宣言頂きます。翌日にはエントリーマシンを豊川用水に放流しました。
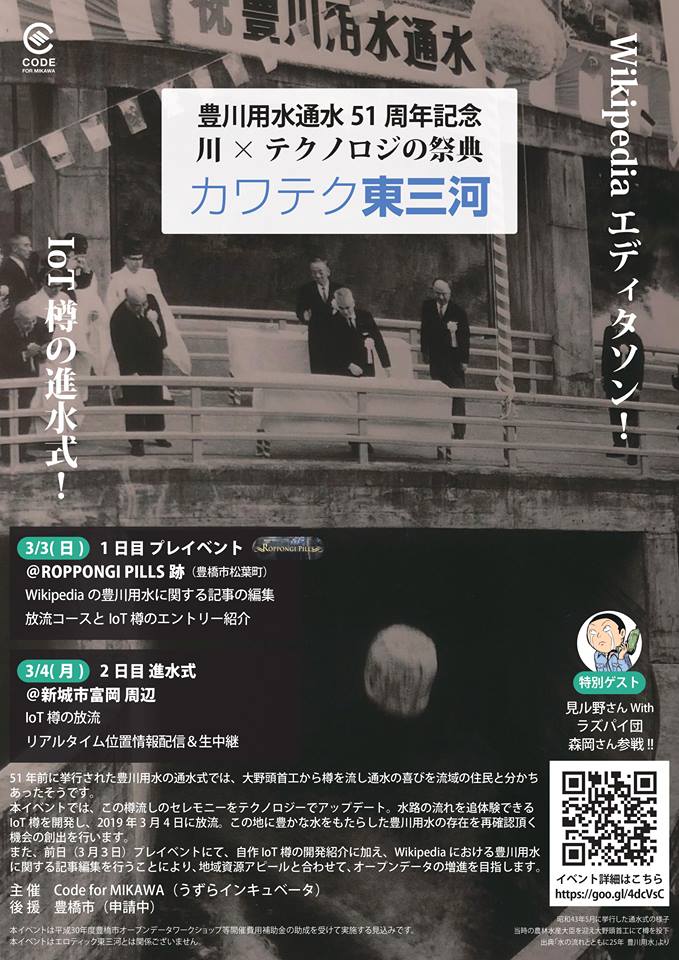
東三河、渥美半島は大きな川がなく、干害にたびたび見舞われて作物を育てるのが大変な場所でした。そんな東三河に近藤寿市郎翁がダムで水をためて用水路を整備する計画を考案し、動き始めました。その後、1968年に豊川用水が完成しました。 51年前に挙行された豊川用水の通水式では、 大野頭首工から樽を流し通水の喜びを流域の住民と分かち合った そうです。また、その様子はNHKで全国放送されました。
昭和43年5月に挙行した通水式の様子 当時の農林水産大臣を迎え大野頭首工にて樽を投下-出典「水の流れとともに25年 豊川用水」より
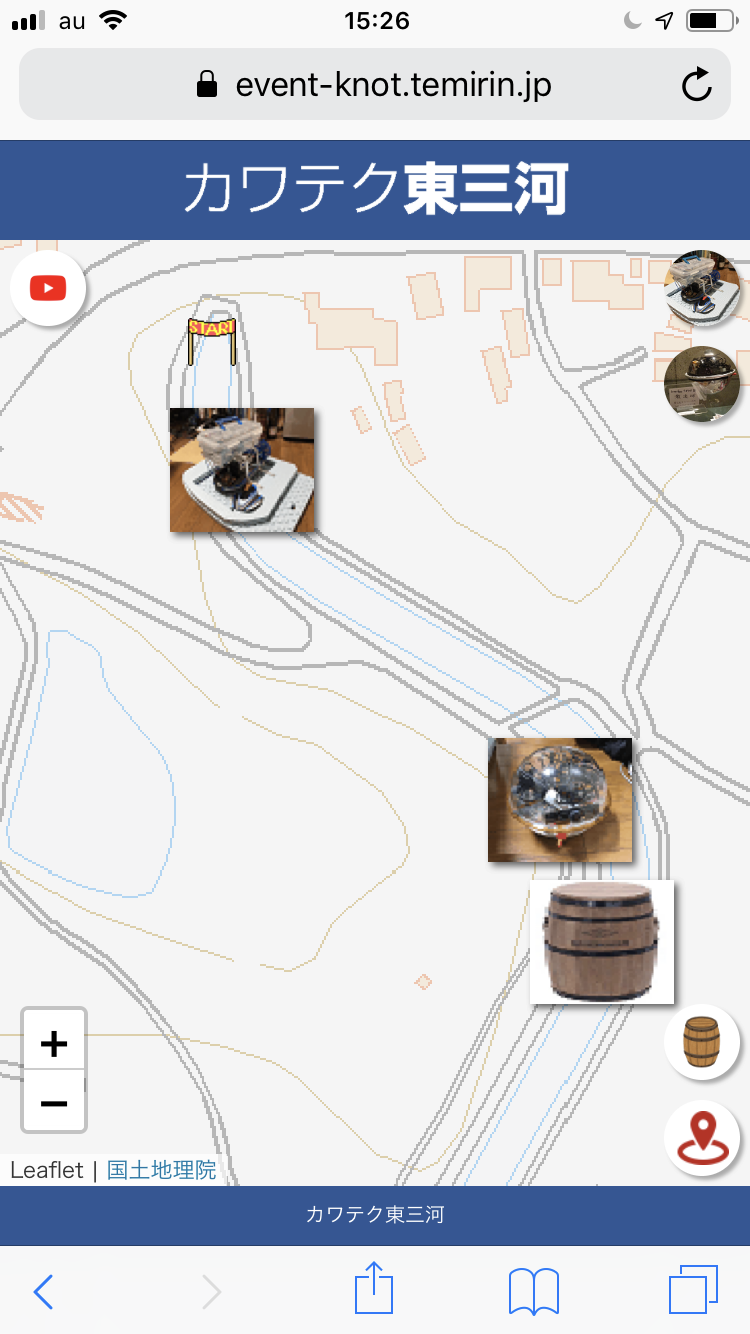
今回のイベントでは、通水を祝う樽流しのセレモニーを現代風にアップデート! 当時の樽に見立てた通信機能を有する小型コンピュータを搭載した IoT樽を開発し、そこから取得される位置、映像などの情報をリアルタイムにインターネットで全世界に配信します。 テクノロジーを活用した情報発信を通して、豊橋市を始めとした豊川用水の流域の住民に対して、普段存在を意識することのない水路の流れを追体験頂くサービスを提供し、この地に豊かな水をもたらした豊川用水の存在を再認識頂く機会の創出を行います。
イベント概要
https://uzura.doorkeeper.jp/events/87598
1日目:プレイベント@ロッポンギピルズ
プレイベントでは豊川用水の歴史、東三河の歴史について勉強し、Wikipediaの豊川用水に関係する記事を編集しました。 その後、IoT樽やラズパイ団のマシン紹介を行い放流イベントについての案内を行いました。
会場
豊橋の六本木ヒルズことロッポンギピルズ跡@豊橋市松葉町で行いました。 おしゃれな雰囲気のお店で貴重な豊川用水の書物を広げながらWikipediaを編集していました。



豊川用水の勉強
水資源機構の山本管理課長より豊川用水の歴史・いま・これからをお話いただき、その後はカワ好きになった参加者からの質問がありました。

Wikipediaの編集について
木村さんより、Wikipedianという人たちやWikipediaの編集ルール、編集のコツを教えていただきました。 
Wikipediaエディタソン
2時間の編集タイムです。豊橋市図書館の司書さんチョイスの豊川用水の本と先ほどのお話から編集する内容を決めて、文章を練り上げていきます。 

Wikipedia成果発表
Wikipediaのどこにどんな内容を加筆したかを順番に説明しました。

今回の成果は次のとおりです。
(木村さん談)大原調整池の記事にはアップデート当初にはなかった国土地理院の航空写真がついていて、それだけでも記事がとても「それっぽくなった」のがおわかりいただけると思います。この航空写真を[[大原調整池]]の記事につけたのは、当日の参加者とは全く関係ないと思われる、一般のウィキペディアンです。ウィキペディアの記事は、こんな感じで多くは少しずつ、たまにドラスティックに積みあがっていきます。
愛機紹介
IoT樽
IoT樽の紹介と樽の見どころの説明が製作者の村井からありました.
IoT樽はオープンデータデイに合わせて開催されたカワテク東三河(2019年3月3,4)のために特注で製作したものです。
IoT樽の設計データはCC BY 4.0 ライセンスのもとで提供します。(詳細はGitHubのLICENSEを参照)


特徴
– GPS
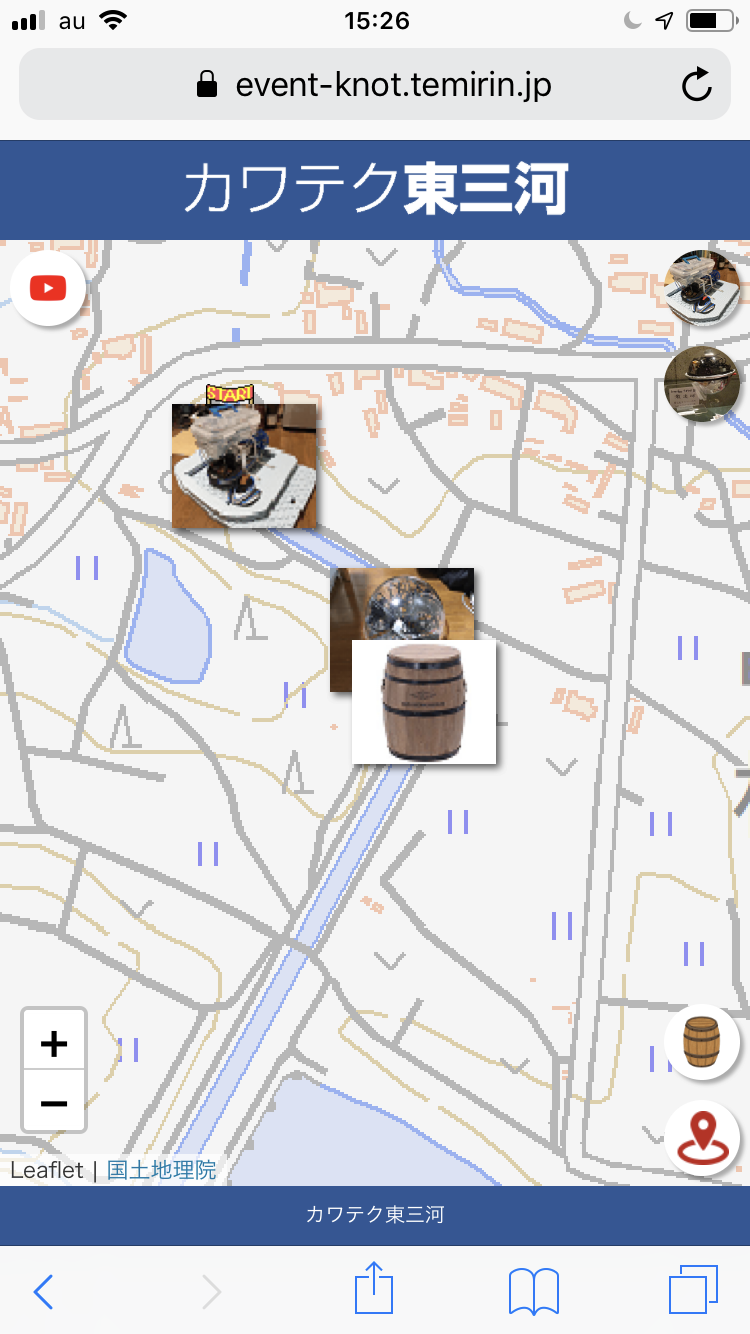
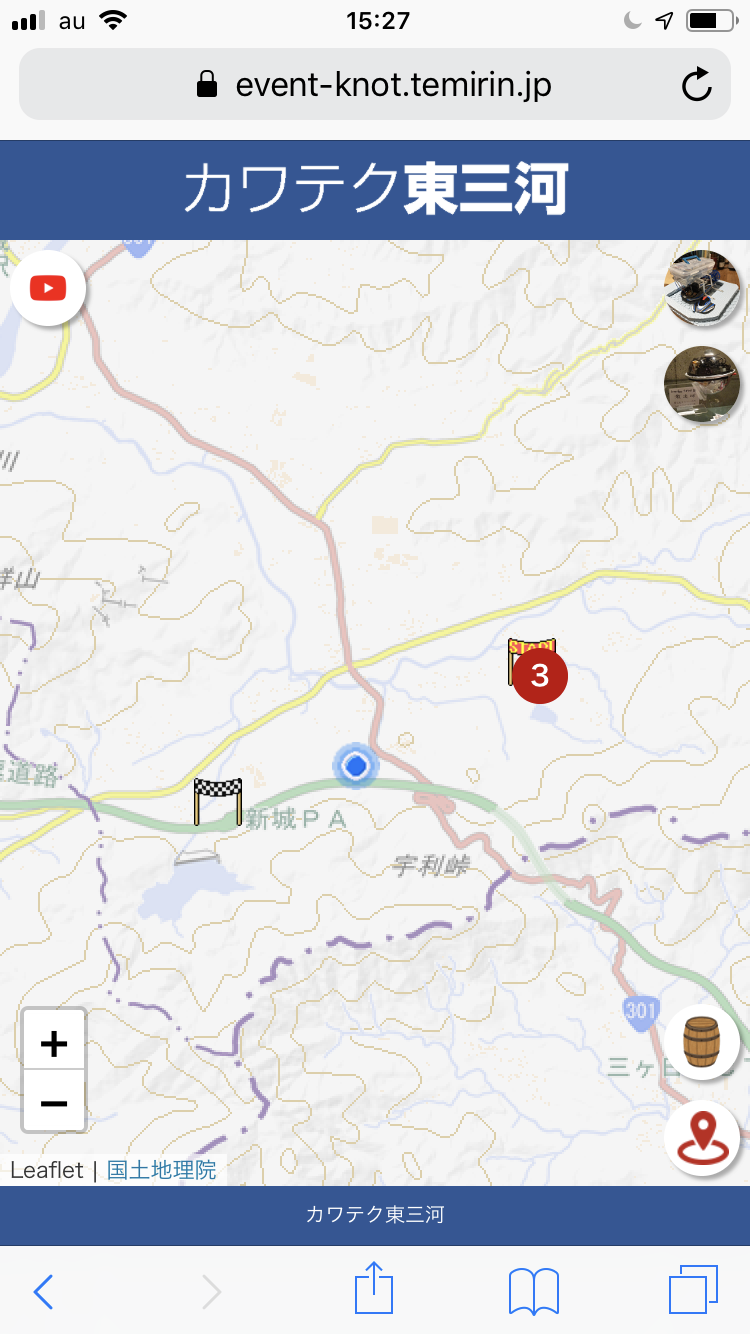
樽の位置情報をウェブに10秒ごとに送信します。位置情報は特設サイトから確認できます。
– カメラ
樽の正面と水中にカメラを搭載しています。このカメラで撮影した豊川用水をYouTube Liveで全世界に公開しています。
– LTE対応
GPSの位置情報、YouTubeLive映像はLTE回線を使用してインターネットに送信しています。
– 4Kカメラ
4Kアクションカメラです。豊川用水を4Kで撮影します。
- Raspberry PiからGPSデータのポスト
https://github.com/jp3cyc/kawatech_gps - Raspberry PiのUPS
https://github.com/jp3cyc/Pi-UPS/ - YoutubeLive配信
https://github.com/jp3cyc/YoutubeLive_by_ffmpeg
ラズパイ団
見ル野様と森岡様(ガチロケット博士)のエントリーマシンの紹介です。 球型とホバークラフト型と特徴のある形です。ホバークラフトは唯一の動力源なので、本番では救助隊として活躍が期待されます! 

記念撮影
ピルズ前でパシャリ 

2日目
まちに待った放流です。 朝は雨がしとしと降っていましたが、昼過ぎには太陽が出てきました。お天道様もカワテクに協力してくれたようです。
放流は34°51’15.2″N 137°31’28.2″Eの地点から行います。
このイベントはYoutubeLiveで3カメラ同時配信を行います。地上カメラ、IoT樽正面カメラ、IoT樽水中カメラからの配信です。 ラズパイ団のカメラ映像は定期的にTwitterに投稿されます。 また、ドローンによる空撮も行いました。
当日のYouTubeでのライブ配信映像は以下よりご覧頂けます!
- カワテク東三河 ライブ配信 地上カメラ
- カワテク東三河 ライブ配信 IoT樽正面カメラ
- カワテク東三河 ライブ配信 IoT樽水中カメラ
また、柘植様よりご提供頂いたドローン空撮の映像は以下よりご覧頂けます!
(柘植様、ご提供ありがとうございます!)
- 3/4 ドローン空撮 カワテク東三河@豊川用水 Vol.1(柘植様撮影)
- 3/4 ドローン空撮 カワテク東三河@豊川用水 Vol.2(柘植様撮影)
さて、当日の様子をご紹介します!
現場は駐車スペースが少ないので、一度集合してから向かいます。  ラズパイ団も準備はOKです!
ラズパイ団も準備はOKです! 
準備
準備風景です。 .jpg)
地上からだとこんな感じで準備が進められていきます。IoT樽はバッテリを入れて、パソコンから配信コマンドを実行するだけでよかったのでセッティングは5分もかからずにおわりました。(これが後に悲劇を生む) 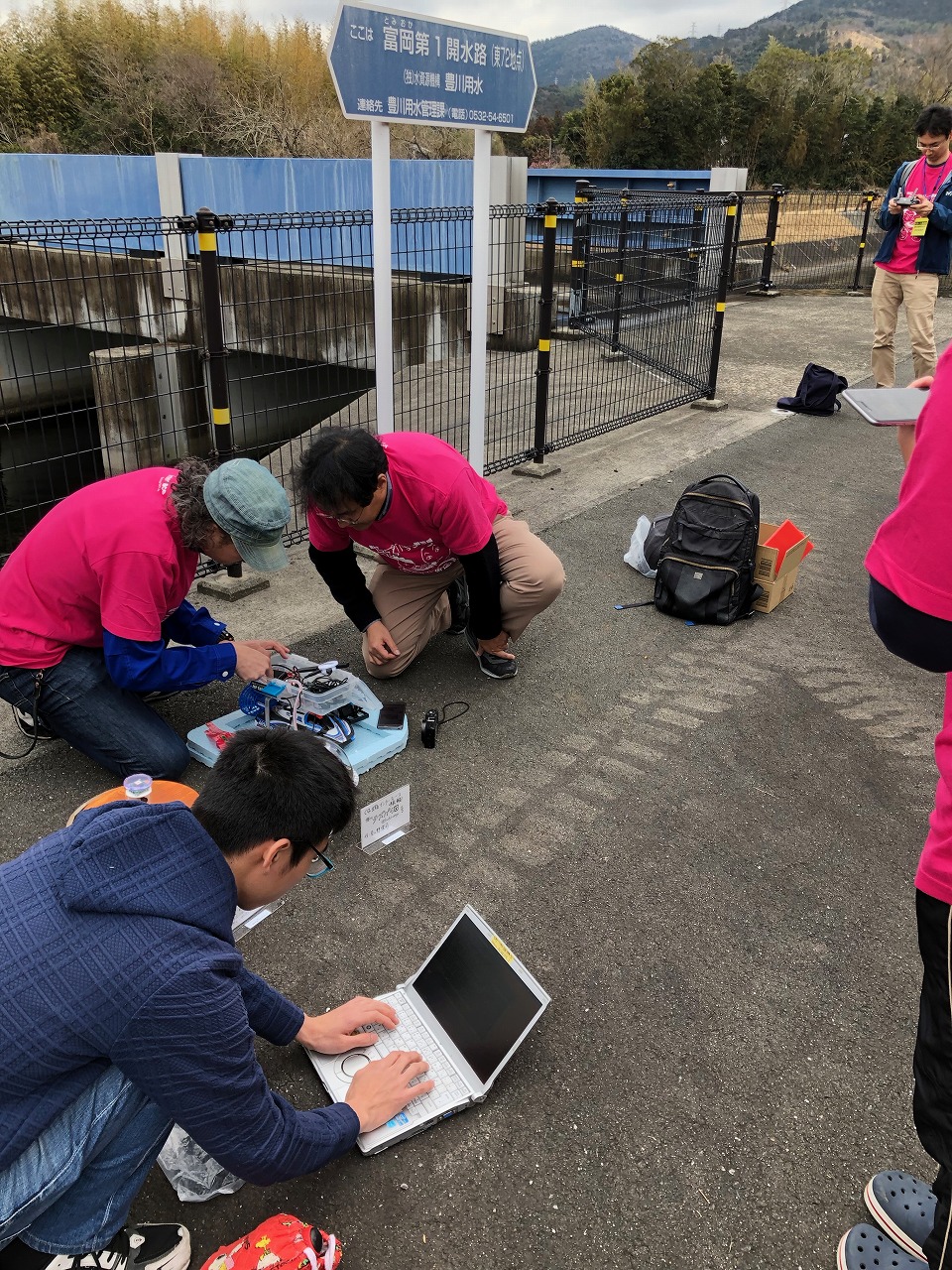
セッティング後のマシンです。これからカワに投入されます。  マシンの撮影会です。
マシンの撮影会です。 
テープカット
51年前をオマージュして、テープカットも行われました。 

放流にむけて
放流前の記念撮影です。これがマシンとの最後の写真になるかもしれないので、念入りに撮影します。 
ちゃんと進むか不安な村井さん 
放流
いよいよ放流です。51年前の通水式と同じように樽を投げて投入します。 
.png)
球も同じように投げ入れました。水しぶきがいい感じにできています。 .jpg)
.jpg)
.jpg) ホバークラフトは投入が大変でした。水まで手が届かなかったので棒を使って慎重に入れていきます。
ホバークラフトは投入が大変でした。水まで手が届かなかったので棒を使って慎重に入れていきます。 .jpg)
第一の関門
落水者を助けるため?のロープが数100mおきにはられています。 IoT樽の映像にも関門が見えてきました。 .png)
そのロープに引っかがったのでロープを持ち上げて乗り越えます。 


.jpg)
どんぶらこ
空から見た豊川用水です
.jpg)
.jpg)
.jpg)
.jpg) 余談ですが、橋桁もきれいに撮影できています。これほど画質が良いのなら橋脚の劣化診断にもドローンは活用できそうですね。
余談ですが、橋桁もきれいに撮影できています。これほど画質が良いのなら橋脚の劣化診断にもドローンは活用できそうですね。
.jpg)
風下に向かって風邪が吹いているので、ホバークラフト、球は順調に進んでいきます。このとき、樽は橋の手前にいます。 .jpg)
空撮からの様子です。
.jpg)
.jpg) 川下からドローンの風が吹いているので樽の動きがストップしています
川下からドローンの風が吹いているので樽の動きがストップしています .jpg)
樽の底の方もきれいに写っています。豊川用水はかなりきれいなようです。 .jpg)
IoT樽からの風景です。 .png)
.png)
水中カメラからのLIVE映像です。はしごのようなものが見つかりました。 .png)
球はホバークラフトの助けをところどころ受けて進んで行きます。 
第二の問題
IoT樽の4Kカメラの電源を入れ忘れたことに気が付きました。 Youtube Liveを見られた方は後ろで叫んでいる様子が確認できるかなと思います。
4Kカメラはアクションカメラを搭載しているため、GPSやLIVEとは別系統となっているので、パソコンから遠隔操作もできない状況です。
橋が見えてきたので橋の上から引き上げようとしましたが、流れが急に早くなり助ける前にながれて行きました。
樽の気持ち:「まだまだつかまんねーよ~」 .png)
.png)
樽は水資源機構の方によって引き上げられました。 電源を入れて再投入です。
4Kカメラからの映像です。生物は確認できていません。餌を付けたら良かったかも。


反省:準備のときにマシンの起動順序をメモしておくと電源の入れ忘れやプログラムの実行忘れがなくて良さそうです。
ひきあげ
ホバークラフトの引き上げです
タモで引き上げられないので、はしごで待機している見ル野さんのもとまで自走で向かいます。
球の引き上げ
タモでサクッと引き上げます
IoT樽の引き上げ
進まなくなり、タイムアップです。川の流れがあまりなく、川の橋で止まりました。
引き上げはタモを使って引き上げられました。樽カメラからだとこんなかんじです。 .png)
集合写真

この放流実験はコンピューター・サイエンス&テクノロジ専門誌 Interface にも取り上げられていて、漫画と記事で掲載されています。
https://interface.cqpub.co.jp/magazine/201905/
https://interface.cqpub.co.jp/magazine/201906/
https://interface.cqpub.co.jp/magazine/201911/